|
|


















Robotics
I inherited this little 'bot' years ago from a fellow who came across it at a trade show he attended. He had no idea what to do with
it or how to make it 'run', so he traded it to me in exchange for a computer for his business. I must confess I havn't done much
with it either, but I have obtained a manual and some batteries for it. Years ago I connected it to my Commodore SX-64 and sent
some commands to it and know the onboard computer works, as it did at least move and flash its LED's. It will end up being a
joint project for my grandson and I to work on in the near future though. I'm retired now and he's a tinkerer and has an interest in
robotics so the time has come to finally make this thing do something.
These robots were originally manufactured for "educational assistance" in schools years ago. They were manufactured by General Robotics but the company has changed hands a few times over the years. There is a website, RBRobotics, that still exists but I think there are only parts available now until the existing inventory is depleted. There is also some good info on that site. My RB5X is a very early model with limited utulity. I have found that the educational software made for it to be very expensive for the most part, so I'll probably install something like an arduino inside, leaving the existing electronics intact in case I decide to restore it to original form at a later date. This should make it a bit more versatlle and easier to program. It would be nice to install some kind of homebrew manipulator arm too. Hey, maybe even a laser! Who knows where it will stop... Later models of this robot had many options available for them, including voice recognigion and speech synthesis, a manipuilator arm, an RF link, and video, to mention a few. I have found a few hobby users/owners online as well as schematics and info for building the original vioce synthesizer that was available for it. Back to the updated microcontroller or SBC idea, I know there are a few ways of generating speech in software without the need of the hardware board, so there's that option also for giving it a voice.
These robots were originally manufactured for "educational assistance" in schools years ago. They were manufactured by General Robotics but the company has changed hands a few times over the years. There is a website, RBRobotics, that still exists but I think there are only parts available now until the existing inventory is depleted. There is also some good info on that site. My RB5X is a very early model with limited utulity. I have found that the educational software made for it to be very expensive for the most part, so I'll probably install something like an arduino inside, leaving the existing electronics intact in case I decide to restore it to original form at a later date. This should make it a bit more versatlle and easier to program. It would be nice to install some kind of homebrew manipulator arm too. Hey, maybe even a laser! Who knows where it will stop... Later models of this robot had many options available for them, including voice recognigion and speech synthesis, a manipuilator arm, an RF link, and video, to mention a few. I have found a few hobby users/owners online as well as schematics and info for building the original vioce synthesizer that was available for it. Back to the updated microcontroller or SBC idea, I know there are a few ways of generating speech in software without the need of the hardware board, so there's that option also for giving it a voice.
Meet RB5X... Looks a teensy bit like R2D2
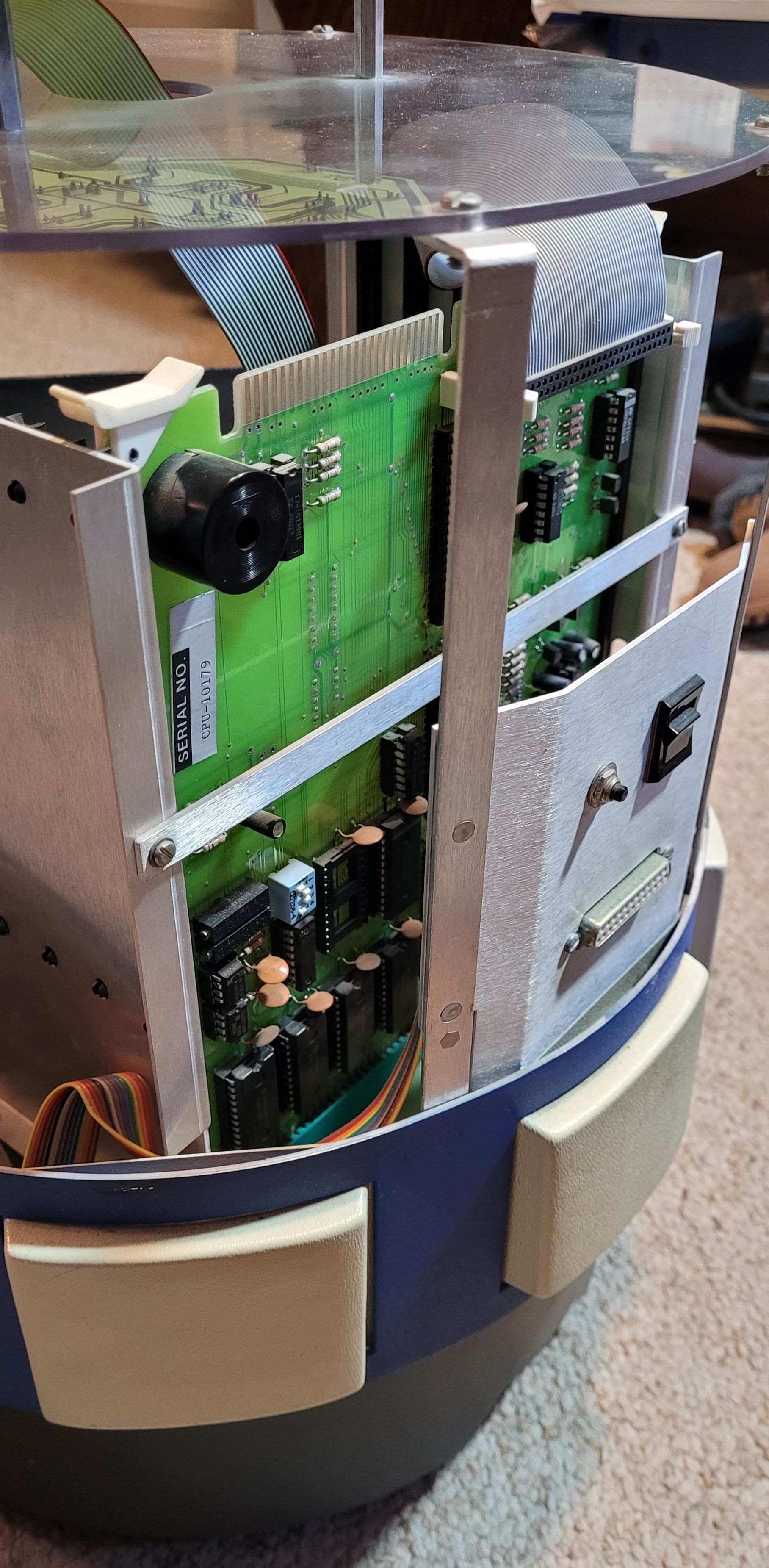
To the right is the back side of RB5X (hood removed). On the
aluminum panel are the reset button, power switch, and RS-232
interface port (a DB-25 connector). The main processor/controller
board can also be seen. The white squares that surround the base
are momentary pushbutton switches that can be used to sense
collisions, or for diagnostic / data input, or for educational games.
The main board is programmed through the connector that is seen
on the aluminum plate below the power switch.
Far right is the front of RB5X. The ultrasonic object/obstruction transducer is in the middle of the black bar, with its control board mounted just to the right of it on the bar. At the top is an LED display board that can be used any way the programmer desires. At the bottom the charging contacts can be seen.
The card cage is also visible below the LED board and clear cover. This model only has the microprocessor board in place but there are other boards that used to be available that could plug into the other slots (mentioned in above paragraphs).
Far right is the front of RB5X. The ultrasonic object/obstruction transducer is in the middle of the black bar, with its control board mounted just to the right of it on the bar. At the top is an LED display board that can be used any way the programmer desires. At the bottom the charging contacts can be seen.
The card cage is also visible below the LED board and clear cover. This model only has the microprocessor board in place but there are other boards that used to be available that could plug into the other slots (mentioned in above paragraphs).
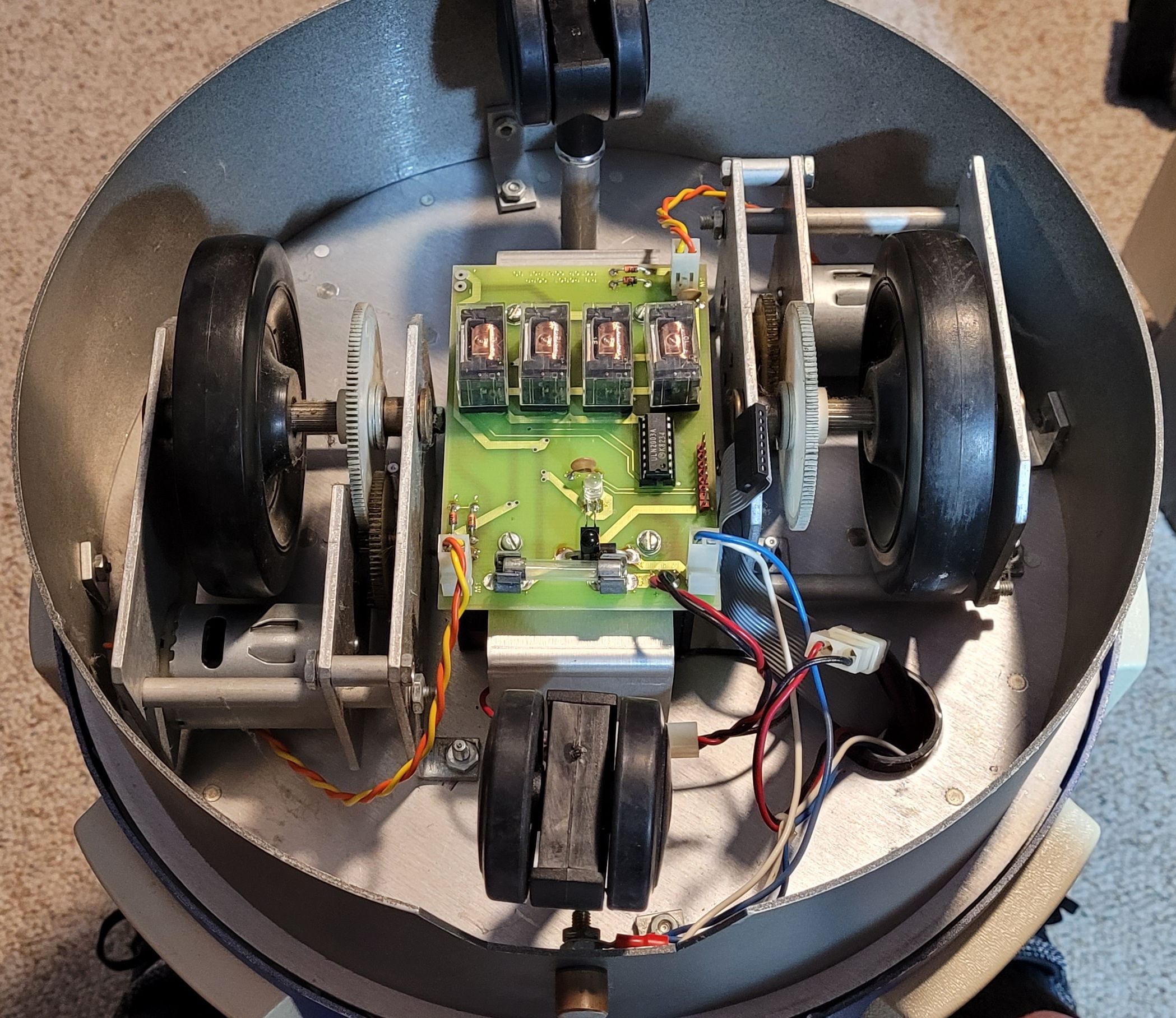
Here's a photo of the underside of RB5X. The wheels are rubber and the casters are regular
office chair plastic casters. The control board sits right in the center. You can see the
control cable (the unplugged gray ribbon cable to the right of the board) which is removed in
prep to plug in the new control box cable. The board also has a very rudimentary
line-following arrangement consisting of an LED and an IR receiver, which can be seen just
above the fuse. Under the board is a bracket that holds one of the two batteries in RB5X.
This one powers the electronics, and a larger one (on other side of the base plate) powers
the drive board and motors.
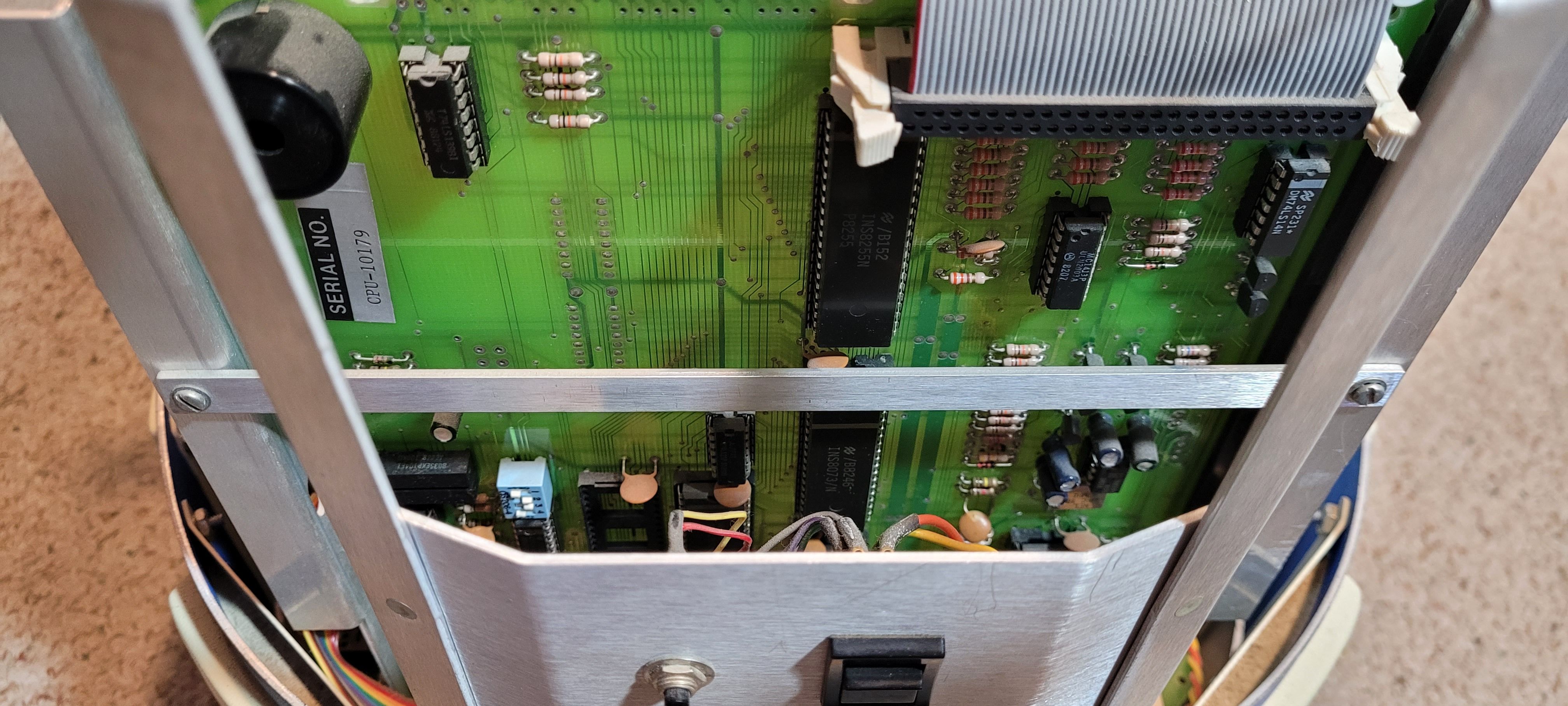
Here's a closer view of the microprocessor board in the cage (click the image to enlarge).
The main I/O chip (INS8255) is top center. The microprocessor chip (INS8073) is just
below it. This board still works! I tested it several years ago using a DIY serial interface to
connect to my old Commodore SX-64 and used a terminal program to send various
commands to RB5X. I got it to move in all directions and made the LED's on top blink.
That's about the extent of my testing, but I'm confident the entire board is fine and could
be programmed using the old robot control language it was designed to use. All this is
available in the manual which I was able to purchase years ago.
Here's some info on my RB5X -
RB5X Project Pages: